




Penyelesaian Robot Welding untuk Panel Dinding Keluli
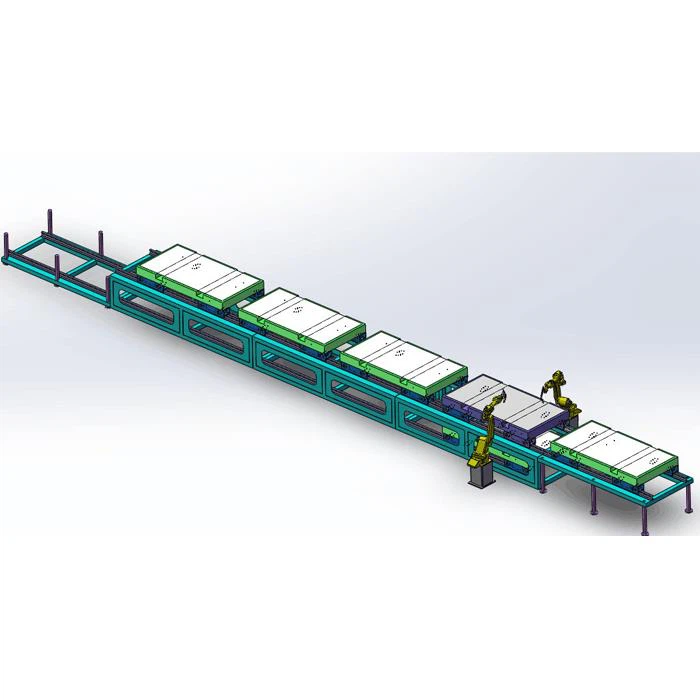
pengelasan Robot penyelesaian untuk panel dinding keluli Permohonan Mesin kimpalan 1. jenis kimpalan plasma 2. 2 set robot, letakkan robot ke bahagian kerja sekeping 3. 2 set sumber kimpalan plasma buatan China 4. Lift 2pcs hidraulik 5. AC servo motor dan pengurang akan dipasang di barisan pengeluaran ....
Description/kawalan
pengelasan Robot untuk panel dinding keluli 
Permohonan Mesin Kimpalan
1. jenis kimpalan plasma
2. 2 set robot, letakkan robot ke tepi bahagian kerja
3. 2 menetapkan sumber kimpalan plasma buatan China
4. Lif hidraulik 2pcs
5. Motor servo AC dan reducer akan dipasang di barisan pengeluaran. Motos ini akan memandu kereta bergerak dari stesen ke stesen. Keranjang akan dilengkapkan dengan penyelesaian yang lengkap. Anda akan bekerja dengan beberapa perubahan (tanpa henti).
6. 1pc elektrik (tiada bateri) kereta servo motor yang digerakkan (menetapkan 2440 × 1220mm panel, motor servo AC, dilengkapi dengan servo motor reducer)
7. Digunakan untuk sambungan kimpal fillet. Keluli perlu menjadi pendahuluan tempat dikimpal.
Parameter Mesin Kimpalan Robot
| Darjah kebebasan | 6 paksi | |
Muatan | 6 kg | |
Jangkau | 1445mm | |
Kelajuan linear kimpalan | 3-10 mm / s | |
Kebolehulangan | ± 0.05mm | |
Diameter dawai pepejal | φ1.2mm | |
Semasa kimpalan | 350A | |
Sensor | OMRON | |
Julat Gerakan | Putaran lengan (JT1) | ± 165 ° |
Lengan keluar (JT2) | ± 150 ° ~ -90 ° | |
Lengan bawah (JT3) | + 45 ° ~ -175 ° | |
Pergelangan tangan pergelangan tangan (JT4) | ± 180 ° | |
Selekoh pergelangan tangan (JT5) | ± 135 ° | |
Twist pergelangan tangan (JT6) | ± 360 ° | |
Kelajuan maksimum | Putaran lengan (JT1) | 240 ° / s |
Lengan keluar (JT2) | 240 ° / s | |
Lengan bawah (JT3) | 220 ° / s | |
Pergelangan tangan pergelangan tangan (JT4) | 430 ° / s | |
Selekoh pergelangan tangan (JT5) | 430 ° / s | |
Twist pergelangan tangan (JT6) | 650 ° / s | |
Momen (N * m) | Pergelangan tangan pergelangan tangan (JT4) | 12 |
Selekoh pergelangan tangan (JT5) | 12 | |
Twist pergelangan tangan (JT6) | 3.75 | |
Momen inersia (kg * m2) | Pergelangan tangan pergelangan tangan (JT4) | 0.4 |
Selekoh pergelangan tangan (JT5) | 0.4 | |
Twist pergelangan tangan (JT6) | 0.07 | |
Cool tags: kimpalan robot kimpalan untuk panel dinding keluli, China, pengeluar, pembekal, kilang
Hantar pertanyaan
Anda mungkin juga berminat





